Dextrous Robotic Hand
11 Degree of Freedoms Dextrous
Manipulator
Introduction
Dextrous Robotic Hand is a Robotic Hand with Five Fingers and has 11 DOF. Driven by RC standard servos. Dextrous Robotic
Hand controlled by potentiometers as sensor equipped Master Glove to indicate the user's fingers positions. A large variety
of different objects can be grasped reliably and the movements of the hand appear to be very natural like human hand movements.
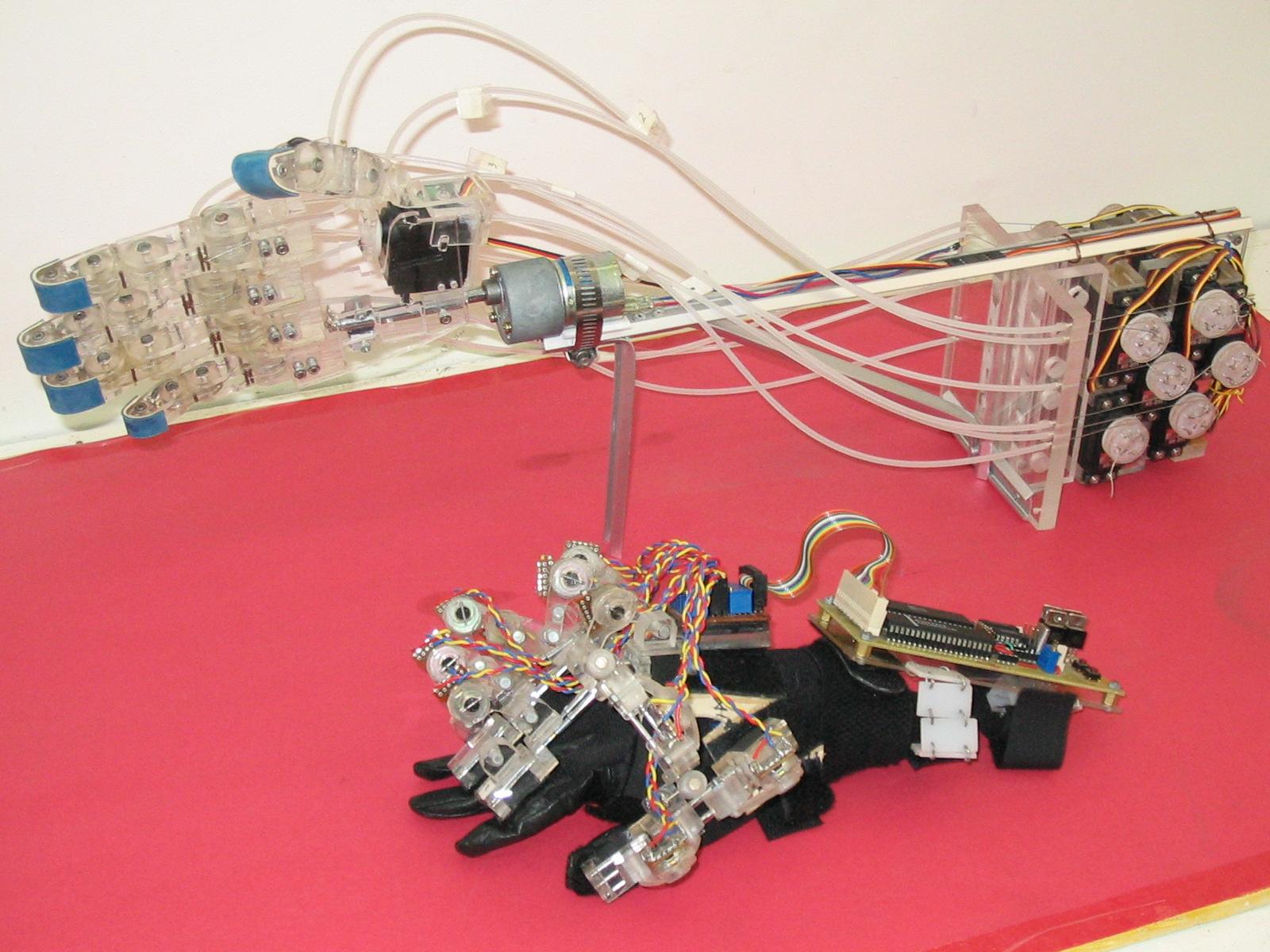
See all images in Gallery
Hand Design
The dimensions of the fingers are close to that of a human one. Each joint has a range of rotation which equivalent to
that of a human hand. Each finger joint use steel wire to drive the fingers for grasp and use a tension spring for go back
to normal position.
Each finger have 2 DOF that is MP (Metacarpal Phalangeal) joint and PIP (Proximal Inter Phalangeal)joint. The DIP (Distal
Inter Phalangeal) joint is passively driven follow PIP joint.
Each Finger is actuated through 2 steel wire and driven by 2 RC Standard Servos. First steel wire driving the MP joint
and other steel wire for PIP and DIP joint. The RC servo have output torque of about 3.7 KgCm (51 OzIn) at 6.0 Volt.
See Mechanical Parts Blueprint here.
Control
The method of control is use a power glove outfitted with potentiometers as sensor across the dorsal surface of the fingers
and thumb.
The brain of The Dextrous Hand ia s Microcontroller AT89S52. Sensor on power glove will give analog input to ADC 0816 and
Microcontroller AT89S52 will take the digital output from ADC0816 and will be process it. Microcontroller output is Pulse
and use to drive RC Servos.
Below is dexhand electronic schematic.
Note: If u want used that schematic, u need to makes some change at ADC0816 section. U must replace
the REF voltage ( pin 19 ) with regulated voltage. About voltage value, u can calculated it for best ADC resolution,
but the voltage must be regulated.



